Research bicycle with lidar
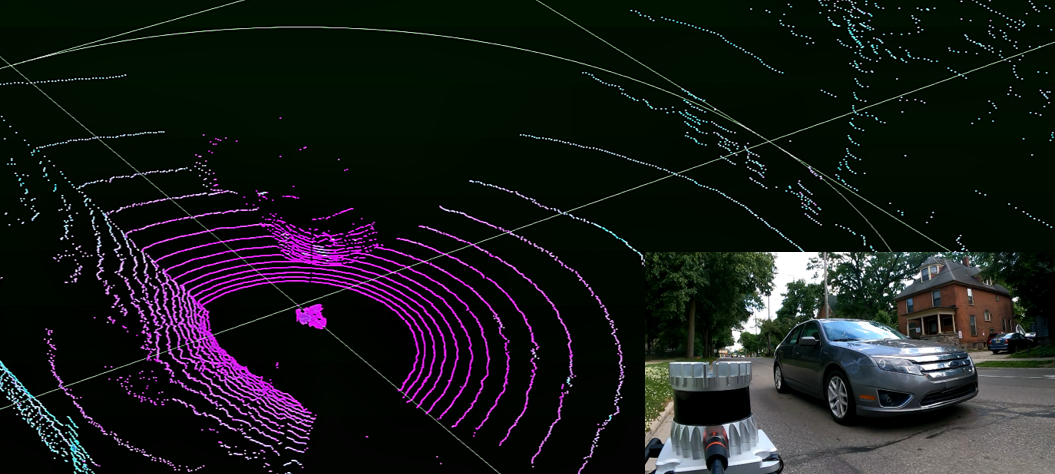
We have developed a research bicycle outfitted with a lidar (Ouster OS1-128). The lidar on the bicycle is able to continuously measure the 3D environment in point clouds, which are made up of hundreds of thousand of data points in a 3-dimensional space.
This lidar bicycle allows us to study driver-bicyclist interactions in real-world roadways with continuous and accurate distance measurements from the bicycle to any nearby objects (e.g., surrounding vehicles). This, in turn, helps us to better understand the safety implications (e.g., driver passing distance when overtaking cyclists) of various real-world street environment and bicycle facility designs.

Online interactive point cloud visualization
You can interact with the point clouds below using a mouse or your fingers to rotate the view or zoom in/out.
You can also click here to open it in a new browser tab.